Research
Overview:
Active projects:
1. Medical Robotics: 
Our research in medical robotics focuses on the development of innovative techniques for minimally invasive procedures, including advanced endoscopic systems and magnetic steering technologies. These advancements have potential applications in treating complex gastrointestinal conditions, epilepsy, and PTSD. By enabling precise targeting and manipulation within the body and brain, our work aims to improve patient outcomes, enhance safety, and reduce the invasiveness of surgical procedures, ultimately expanding the capabilities of medical interventions.
2. Magnetic micro-robots for medical applications:
Robotic technologies have significantly enhanced medical procedures in the past few years. Robotic surgery and rehabilitation are now widely being used in medical centers. Micro-robotic systems, in particular, have great potential to revolutionize medical diagnostics and treatment. An untethered micro-robot could be used for early diagnostics, microsurgery, targeted drug delivery, and several other medical operations. We would like to design, fabricate, and experimentally test untethered magnetic micro-robots that can maneuver inside the human body effectively and perform such medical tasks.
3. Soft Robotics:
Inspired by the distributed sensing and actuation of octopuses, we would like to design, fabricate, and control robust and autonomous soft arms with force-sensitive hydrogel “muscles” and embedded silver “neuron” networks. The distributed control achieved via local sensing, processing, and actuation enables high-level tasks such as grasping, twisting, and propulsion without central control.
4. Space Robotics: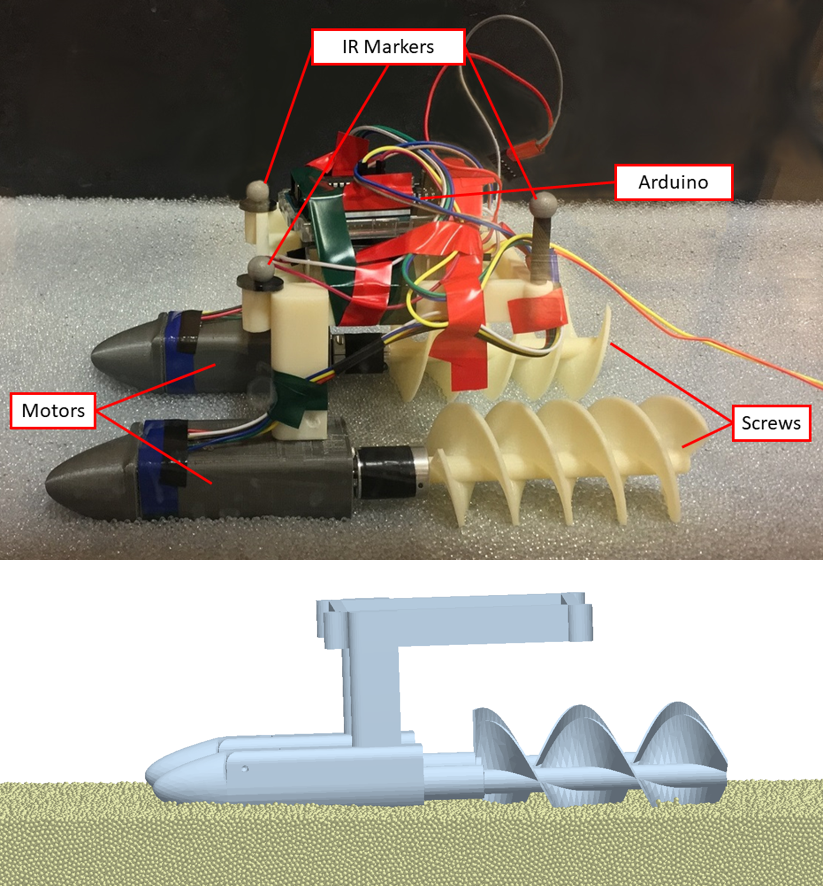
Asteroid mobility has been a continuous challenge in the space sector. The microgravity of an asteroid presents serious problems for common forms of mobility such as wheeled vehicles. Compounding this issue is the prevalence of deep granular regolith rather than solid ground on many large asteroids such as Phobos and Itokawa, which prevent approaches such as magnetic or grip anchoring.
Screw-propelled locomotion has been widely used for terrestrial applications such as transportation over mud, snow, and amphibious environments. These types of vehicles were considered during the design of the first lunar rover, given their success in aqueous and arctic media. However, there have not been any studies about the potential effectiveness of screw-powered vehicles on a small body environment such as an asteroid. We would like to design, fabricate, and experimentally test a screw-powered vehicle that can continuously navigate a granular, microgravity environment.
Past Projects:
Physics of Animal Interactions with their Complex Environments and Developing Bio-inspired Robotic Systems
1. Sidewinding Locomotion of Snakes and Snake-robots on Sandy Hills
Using an air-fluidized bed, and a ground control system for controlling sand volume fraction and inclination angle, we systematically studied the sidewinding locomotion of snakes on sand. We recorded sidewinder rattlesnakes climbing different sandy inclines and calculated the 3-dimensional position of tracked markers in time. We found snakes generate two independently controlled orthogonal waves and adjusting the aspect ratio of these two waves is the key to their successful climbing on sandy hills. We then applied this control template to a snake-robot developed at Carnegie Mellon University (CMU) and now the robot can successfully climb nearly the highest possible angles on loose sand. Finally, we studied the transient physics of granular media at different inclinations to understand the reasoning behind such a template used by the animal. We found the stiffness of granular media is decreased by increasing the inclination angle and snakes increase their contact length with sand to compensate for that and stay below the yield regime.
H. Marvi, C. Gong, N. Gravish, H. Astley, M. Travers, R. Hatton, J. Mendelson, H. Choset, D. Hu, and D. Goldman, “Sidewinding with minimal slip: snake and robot ascent of sandy slopes,” Science, 346(6206), pp 224-229, 2014.
New York Times, Washington Post, Los Angeles Times, BBC, VOA, Reuters, Scientific American, and many others.
2. The Role of Functional Surfaces in the Locomotion of Snakes
We developed numerical models and experimental techniques to study two modes of snake locomotion: concertina and rectilinear gaits. The focus of this study was on understanding the mechanisms snakes use for adjusting their frictional properties and reducing their cost of transport. We found snakes utilize a combination of friction-enhancing techniques. Particularly, they use both passive mechanisms such as scale geometry and texture, and active techniques like adjusting their ventral scales’ angles of attack as well as body lifting and side pushing to adjust their frictional properties. We then developed two snake-like robots that could actively control their scales.
H. Marvi, J. Bridges, D. Hu, “Snakes Mimic Earthworms: Propulsion Using Rectilinear Traveling Waves, “Journal of the Royal Society Interface, 10(84), 2013.
H. Marvi, D. Hu, “Friction Enhancement in Concertina Locomotion of Snakes.” Journal of the Royal Society Interface, 9(76), pp 3067-3080, 2012.
H. Marvi, G. Meyers, G. Russell, D. Hu, “Scalybot: a Snake-inspired Robot with Active Frictional Anisotropy,” ASME Dynamic Systems and Control Conference, 2011.
IEEE Spectrum, Discovery News, Science Daily, Inside Science, New Scientist, and Smart Planet, and many others.
3. Bio-inspired Fibrillar Structures for Control of Frictional and Adhesive Properties
Adaptive attachment mechanisms can significantly improve the efficiency and effectiveness of all-terrain robots. In this study, we developed a mechanism that can control both friction anisotropy and friction magnitude in any planar direction. We also designed and fabricated a robotic platform to test the effect of custom-made fibrillar structures on the speed, steering, and climbing performance of vibration-driven robots. We are now using 2-photon lithography techniques to fabricate micro-scale fibers with spatular tips and experimentally investigate optimal adhesive structures.
H. Marvi*, Y. Han*, M. Sitti, “Actively Controlled Fibrillar Friction Surfaces.” *Equally contributing authors.
Y. Han*, H. Marvi*, M. Sitti, “Fiberbot: A Miniature Crawling Robot Using a Directional Fibrillar Pad,” IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, May 2015.