
Utilizing intelligent transportation infrastructures can significantly improve the throughput of intersections of Connected Autonomous Vehicles (CAV), where an Intersection Manager (IM) schedules the cross-time of incoming CAVs. In addition, accidents that happen at intersections due to human errors can be reduced.
Crossroads
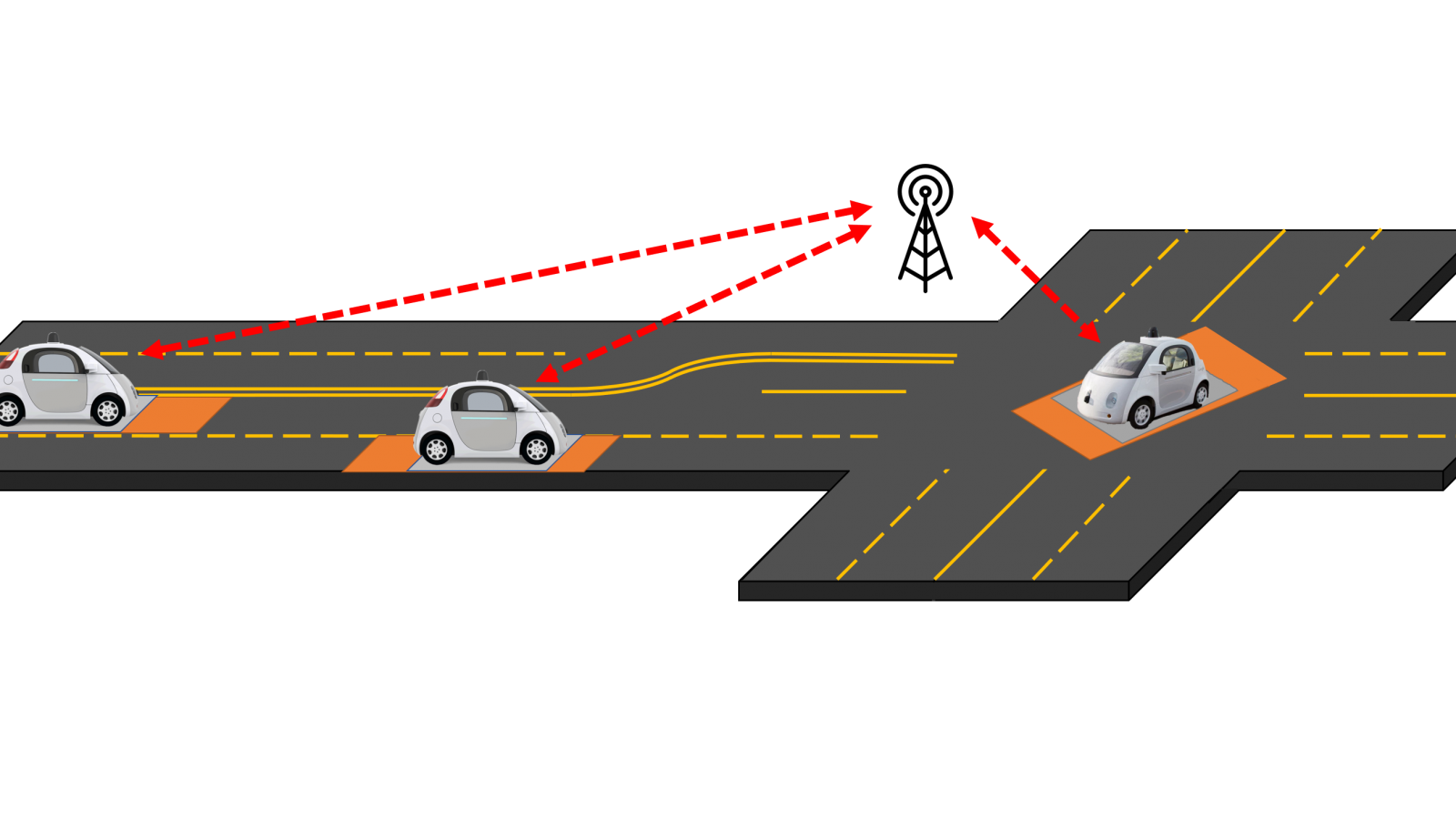
In Crossroads, we identified the effect of Round-Trip Delay (RTD) on the safety of existing approaches and proposed a deterministic solution that is safe and efficient.
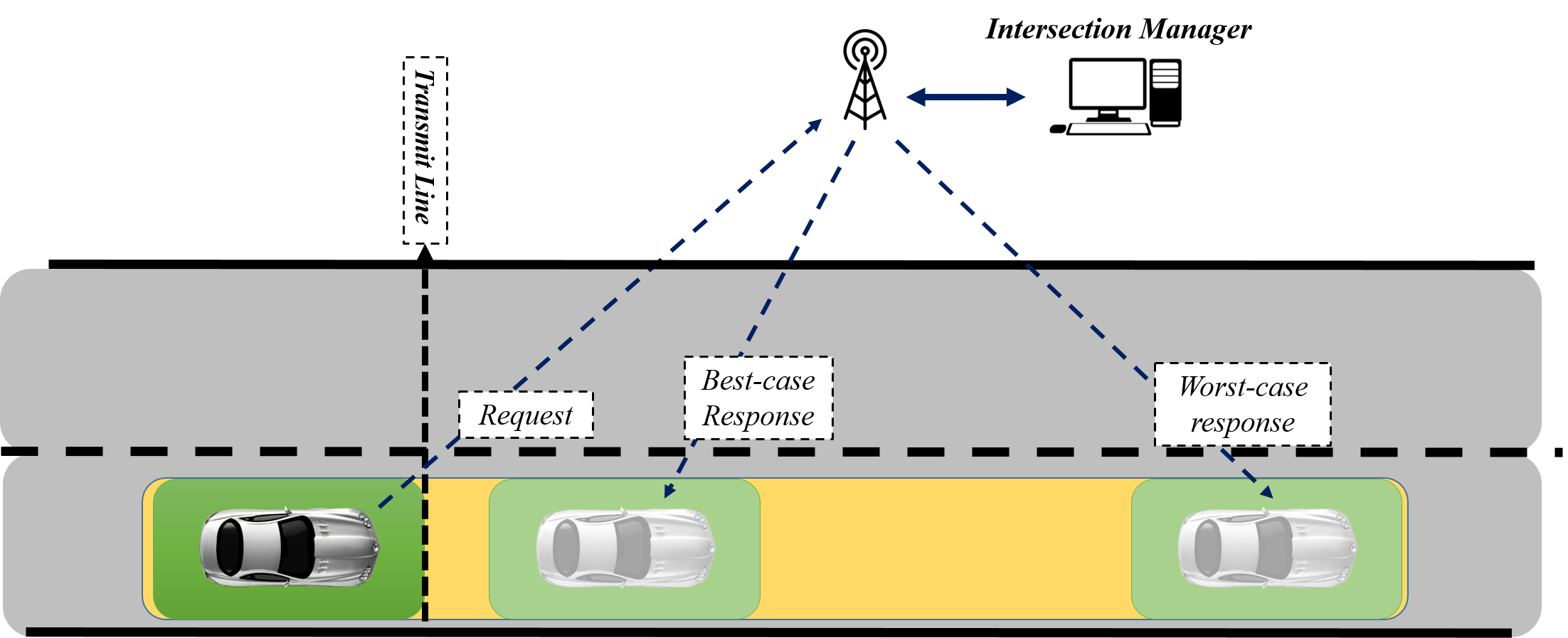
After clock synchronization, IM assigns an actuation time to a CAV which is greater than the worst-case RTD to make sure it will be delivered on-time. In case the delay is larger, the CAV stops.
RIM
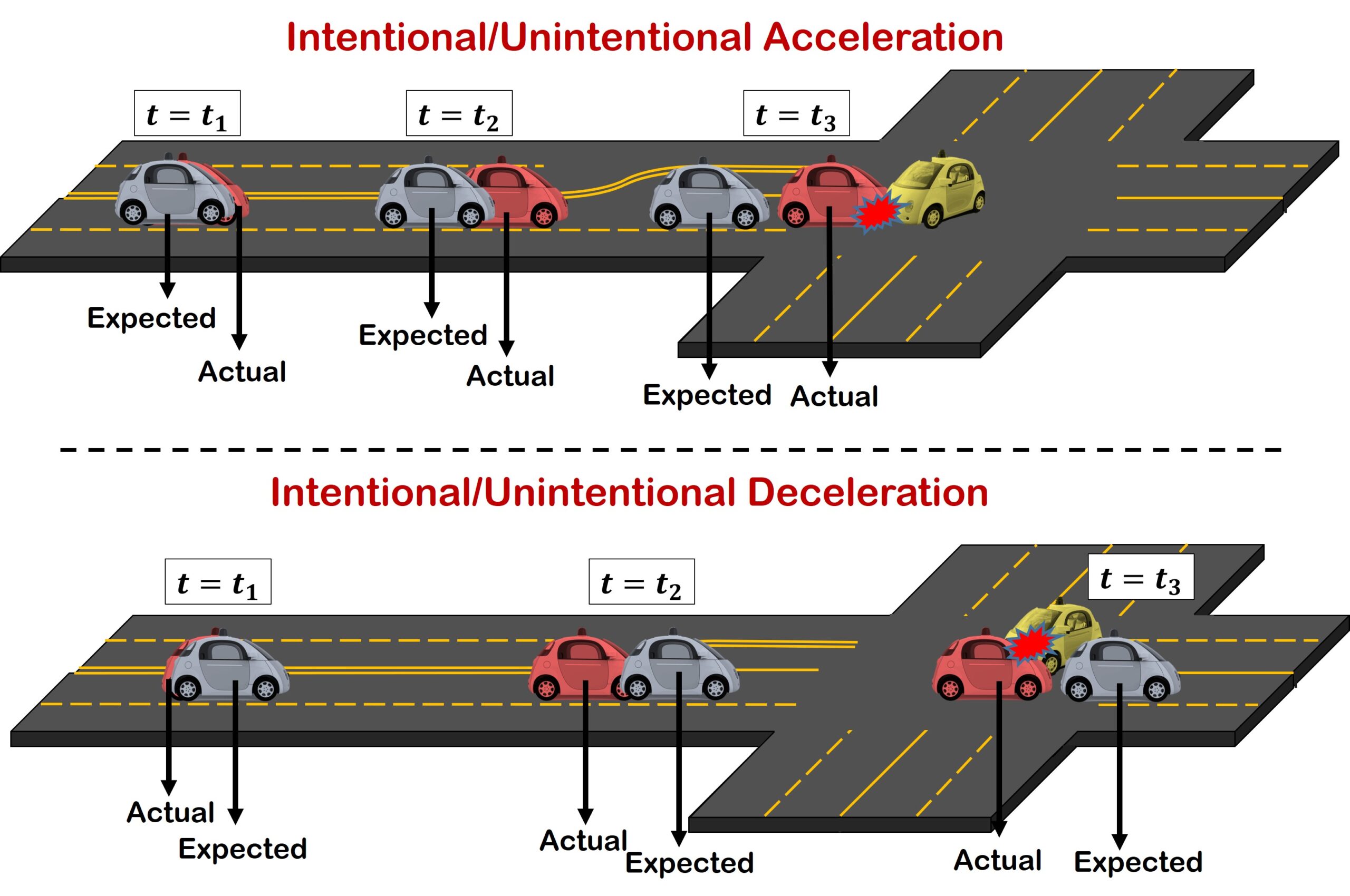
In RIM, we studied challenges of intersection management when the considered model is uncertain and external disturbances exist.
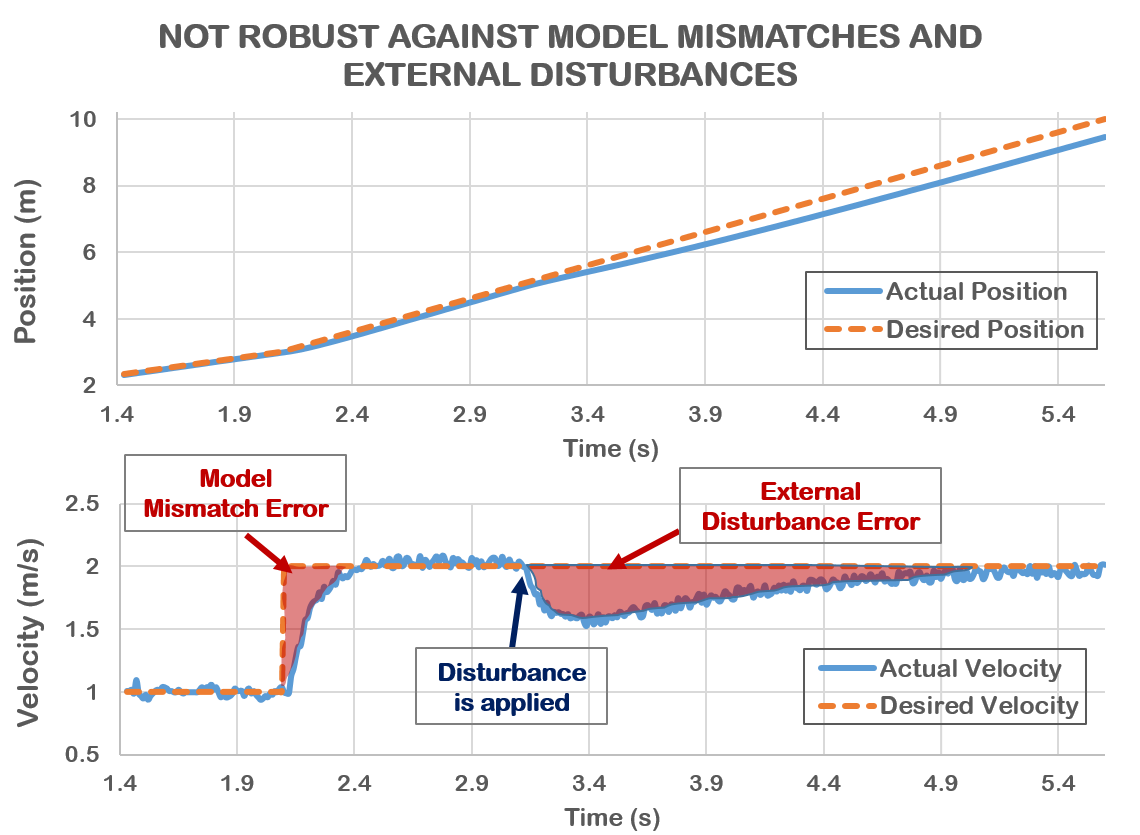
We proposed a new interface between the IM and CAVs where CAVs create their own desired trajectory and track it.
Crossroads+
We improved our previous work (Crossroads) and proposed a new algorithm (Crossroads+) that accounts for model mismatches by knowing the configuration of the speed controller and dynamics of the vehicle.
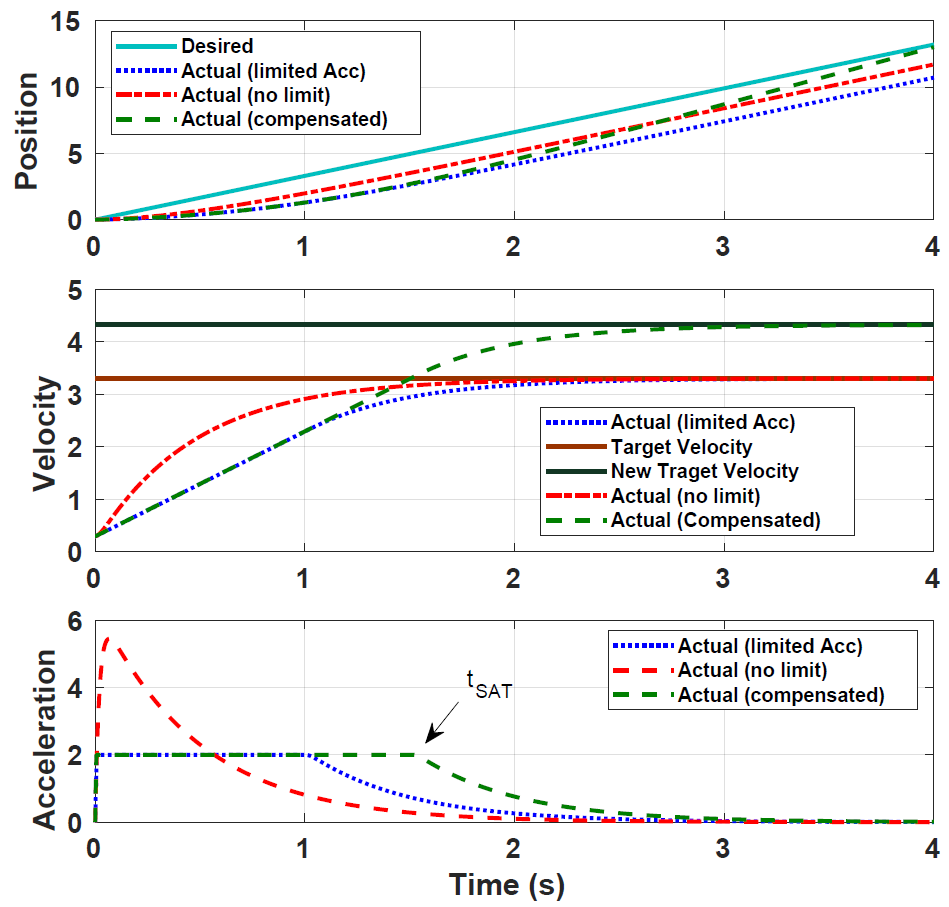
By compensating for the response time of the vehicle (to maintain the desired velocity), a safe schedule of the intersection is possible.
R2IM
Existing intersection management techniques are built assuming all CAVs send the correct information when sharing their status with the intersection manager (IM) and obey IM’s command accurately. This is, however, a strong assumption to keep since CAVs are prone to cyberattacks and unexpected faults can happen during the operation of the intersection.
In R2IM approach, we refer to a dishonest or disobedience CAV a “Rouge Vehicle” and propose an intersection management technique that with the help of a surveillance system can ensure that no accidents happen inside the intersection area as long as only one rouge vehicle is present at a time.
Survey
we have done a broad survey on intersection management of connected autonomous vehicles, which studies different aspects of intersection management.
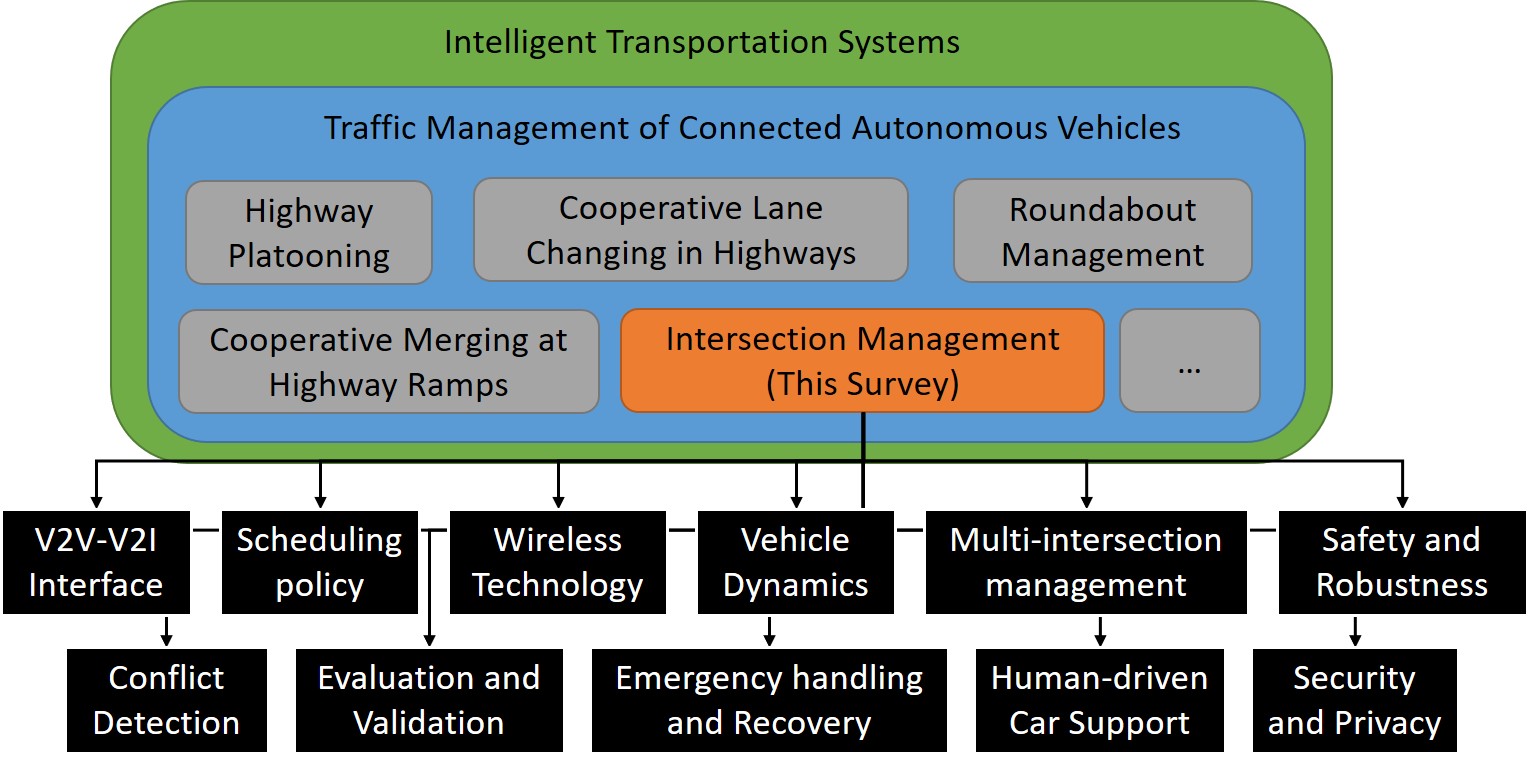
1) intersection management interface, 2) scheduling policy, 3) existing wireless technologies 4) existing vehicle models used by researchers and their impact, 5) conflict detection, 6) extension to multi-intersection management, 7) challenges of supporting human-driven vehicles, 8) safety and robustness required for real-life deployment, 9) graceful degradation and recovery for emergency scenarios, 10) security concerns and attack models, and 11) evaluation methods
V2V-based Cooperative Motion planning of CAVs
We proposed a new safety rule for CAVs based off the Responsibility Sensitive Safety (RSS) rules that can be applied to any road geometry and scenario and it is easier to implement. Figure below shows the overview of our motion planning algorithm.
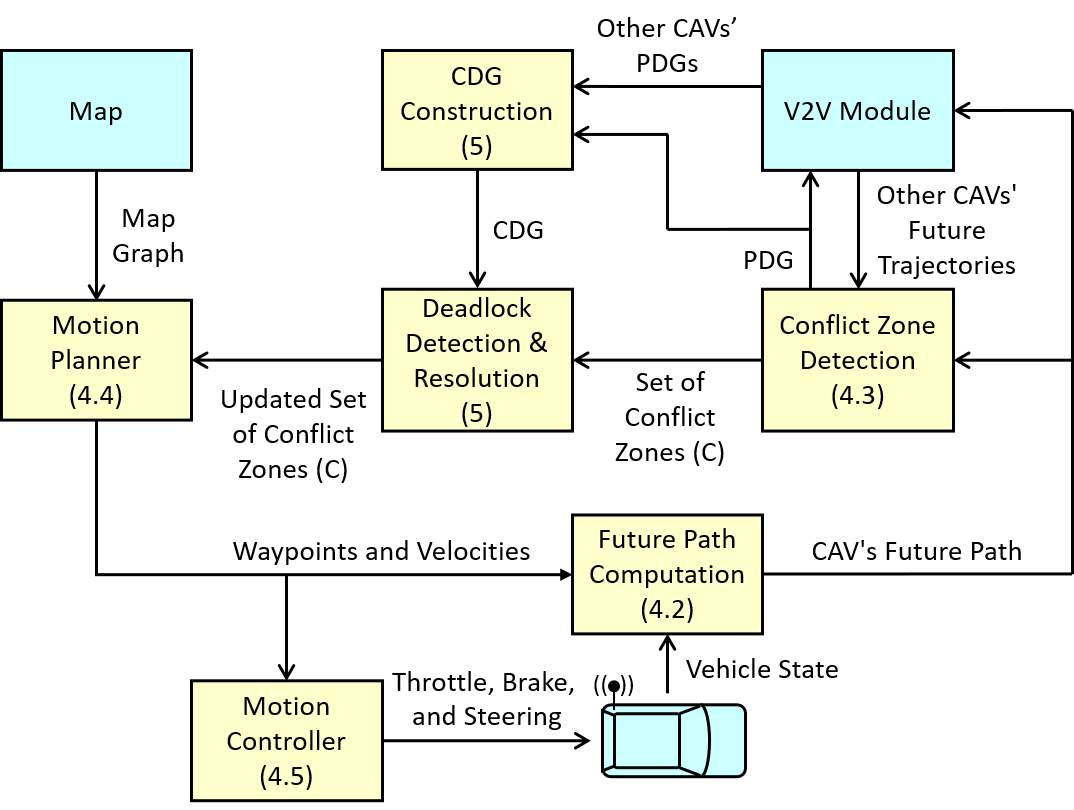
Initially, each CAV broadcast its information (position, velocity, future path) and upon receiving information of other CAVs, they determine if there are possible conflict zones and who has the advantage to enter them first. The CAV with a disadvantage considers the worst-case behavior for the other CAV and updates its motion plan. Our algorithm is also able to detect and resolve deadlock where each CAV broadcasts its Partial Dependency Graph (PDG) and upon receiving other CAVs’ PDG, it constructs the Complete Dependency Graph (CDG). By removing cycles from the CDG, deadlocks are resolved.
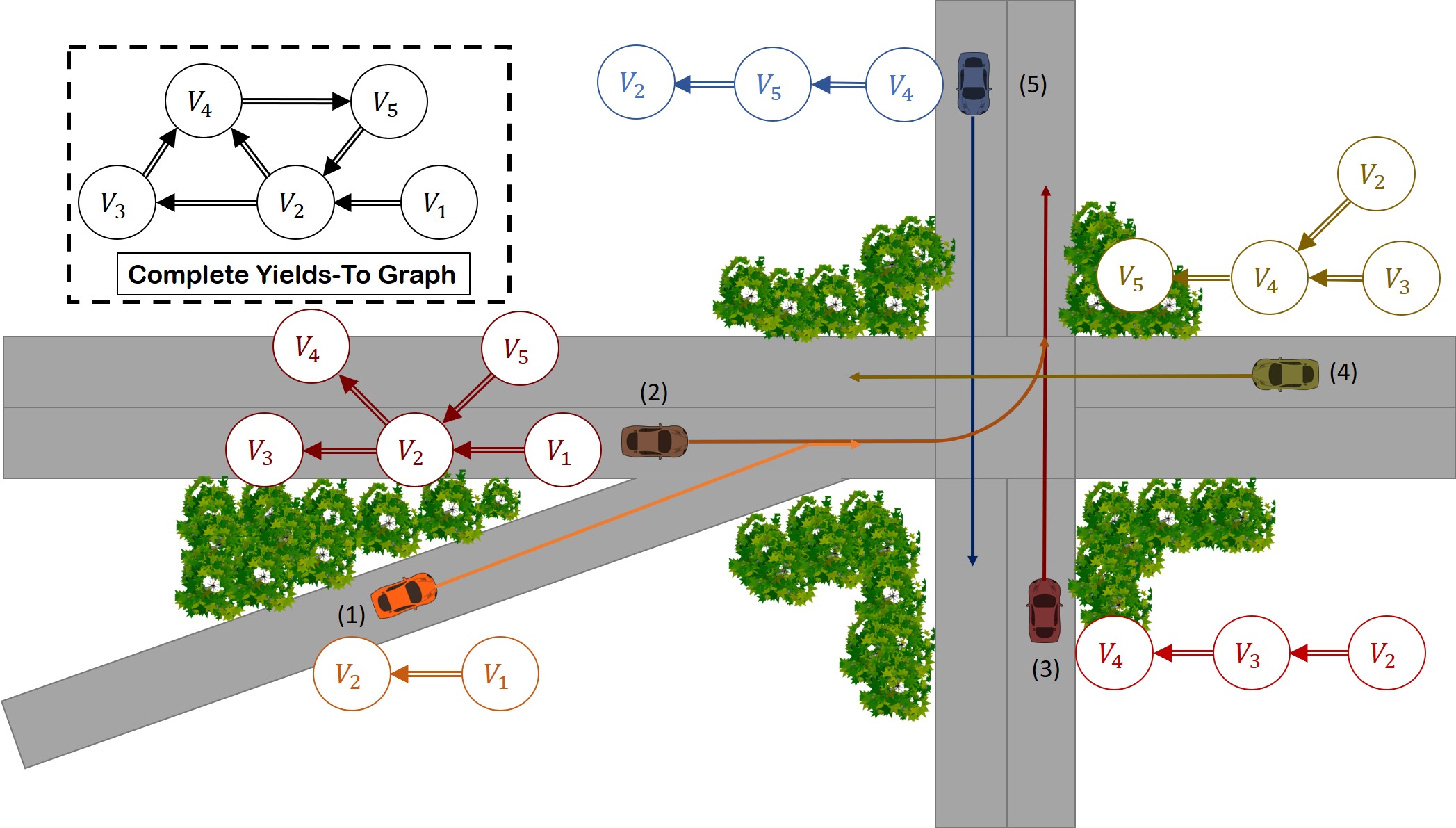
Above Figure shows a deadlock scenario with PDG and CDG of CAVs.
Our Publications
Our Simulator in Matlab
Reading List